Hi, I'm Lorenzo Vianello.
Postdoctoral fellow at Shirley Ryan AbilityLab, passionate Robotics Researcher.
About
About Me: I am a Postdoctoral Fellow at Shirley Ryan AbilityLab, working under the supervision of Dr. Jose Pons. My research focuses on the use of lower-limb exoskeletons to facilitate interaction between therapists and patients, as well as the application of machine learning algorithms to enhance user-exoskeleton control. Previously, I earned a Ph.D. from the University of Lorraine under the supervision of Alexis Aubry and Serena Ivaldi. My dissertation, titled "Human-Robot Mutual Collaboration," explored physical human-robot interaction in industrial and rehabilitation settings. Before that, I obtained a Master's degree in Artificial Intelligence and Robotics (2019) from Sapienza University of Rome, Italy, and a Bachelor's degree in Information Engineering from the University of Padua, Italy.
Beyond Research: Outside of academia, I have a strong passion for sports. I played rugby and competed in weightlifting events in both Italy and France. I also enjoy outdoor activities such as climbing, biking, and running.
- Languages: C++, Python, Matlab/Simulink, Java
- Robotics: ROS, Dart, Gazebo, V-Rep
- Frameworks: Keras, TensorFlow, PyTorch
- Tools & Technologies: Git, Docker
Experience

- Supervisor: Jose Pons
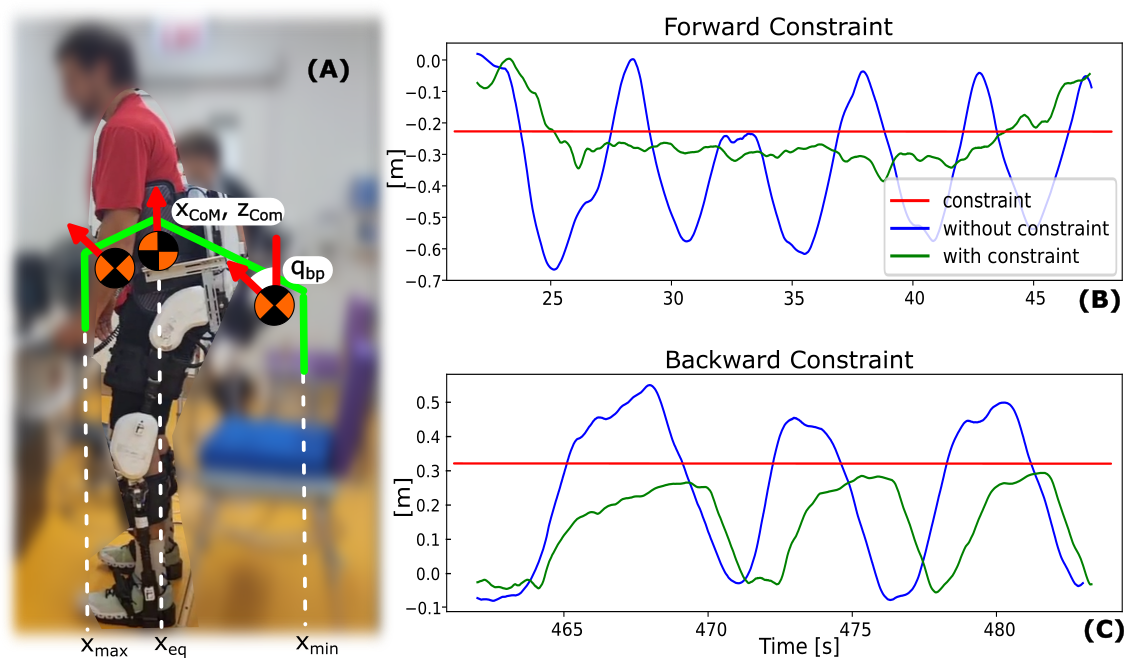
- My work has primarily involved developing and testing control strategies aimed at restoring walking abilities in patients with stroke or spinal cord injuries.
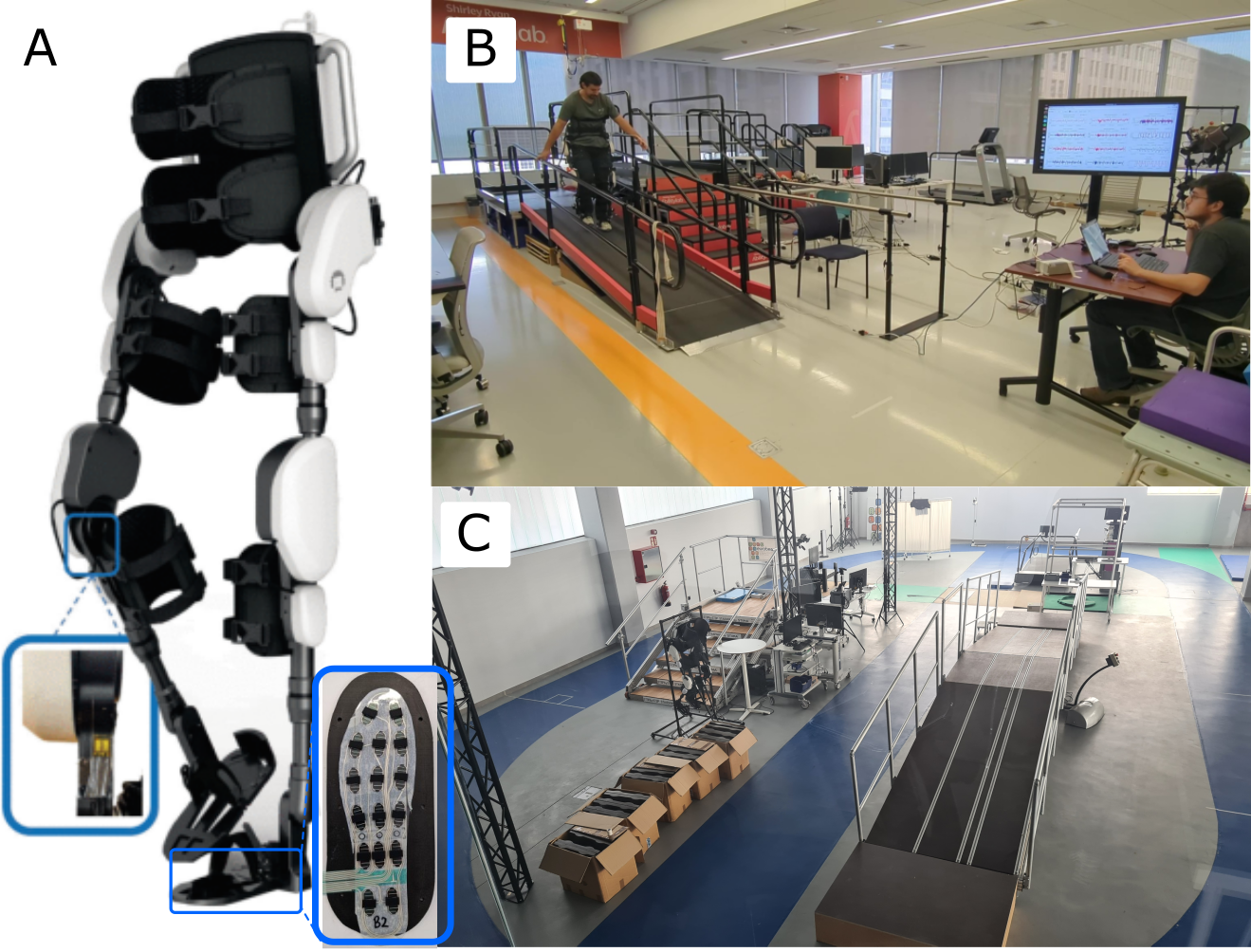
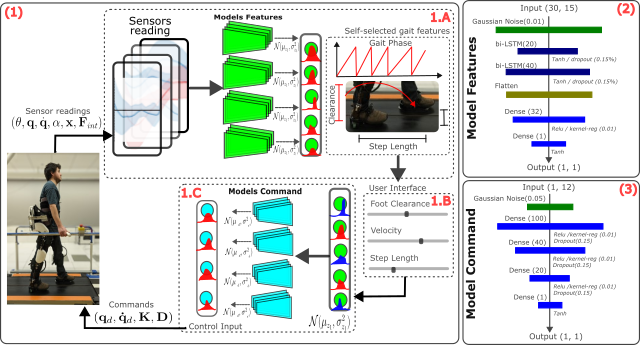
- Machine-learning-based controllers for exoskeletons: We collected a comprehensive dataset of healthy individuals walking with an exoskeleton under various locomotion conditions, including overground walking, stair climbing, and ramp ascent/descent. Using this dataset, we trained machine-learning models to determine the type of assistance the exoskeleton should provide to users. The framework has been successfully tested on several healthy individuals as well as two post-stroke patients, delivering adaptive assistance across multiple locomotion modes.
- Robot-mediated physical interaction in neurorehabilitation: This technology utilizes two robots to mediate interactions between two users—in our case, a therapist and a patient. In the proposed scenario, both the therapist and the patient wear exoskeletons, and the movements of each individual are transmitted to the other through the two robots. This framework has been tested on six post-stroke patients and six patients with incomplete spinal cord injuries, demonstrating its ability to mediate interaction between the therapist and the patient.
- Supervisor: Serena Ivaldi, Alexis Aubry
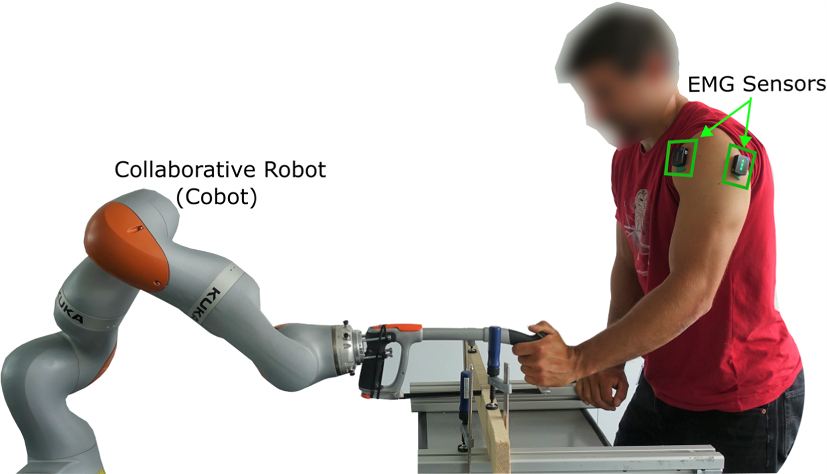
- Human-robot collaboration and physical interaction.
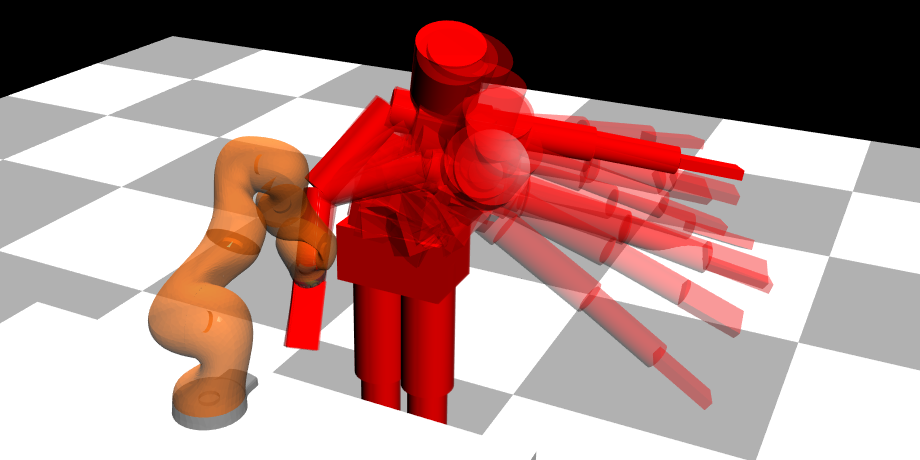
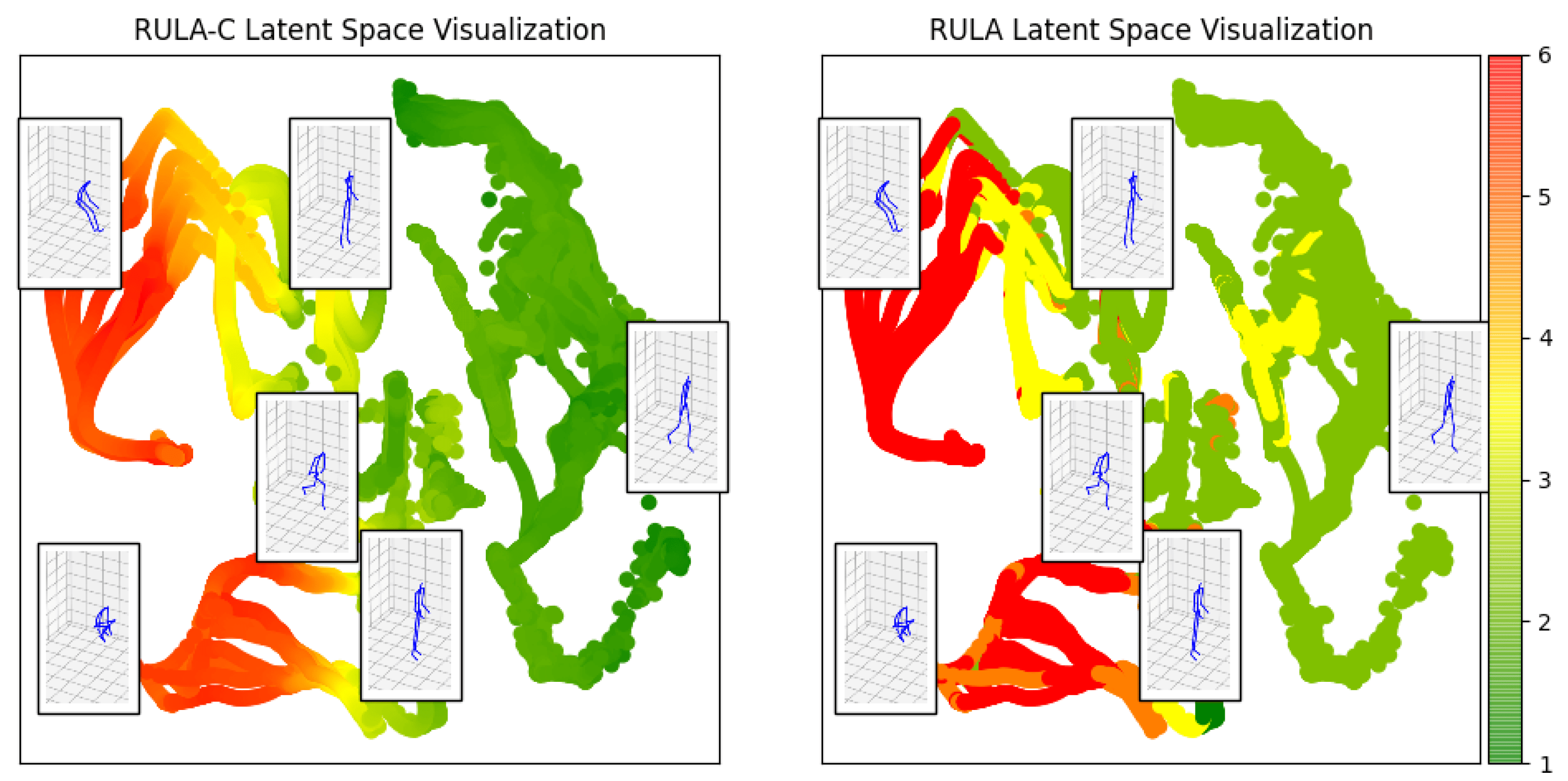
- Human posture evaluation and prediction: We developed an algorithm that using model based machine learning techniques predicts human postures by modeling the null space parameters of motor behavior.
- Human-Robot Roles Allocation: We formalized role allocation between humans and robots, and studied how humans naturally adapt to robotic behavior, observing that changes in robot policies trigger adaptation mechanisms in humans.

- Supervisor: Luka Peternel
- Human adaptation in different robot control modes during human-robot interaction. HRpI.
- Human-Robot Roles Adaptation: We conducted human studies to understand how users adapt to changes in robot roles (Leader, Follower, Reciprocal, Mirrored) using Tele-impedance driven approaches to control the robot.
- Supervisors: Serena Ivaldi (INRIA), Jean-Baptiste Mouret (INRIA), Giuseppe Oriolo (Sapienza University, Rome).
- Grasp Planning exploiting human feedback
Projects
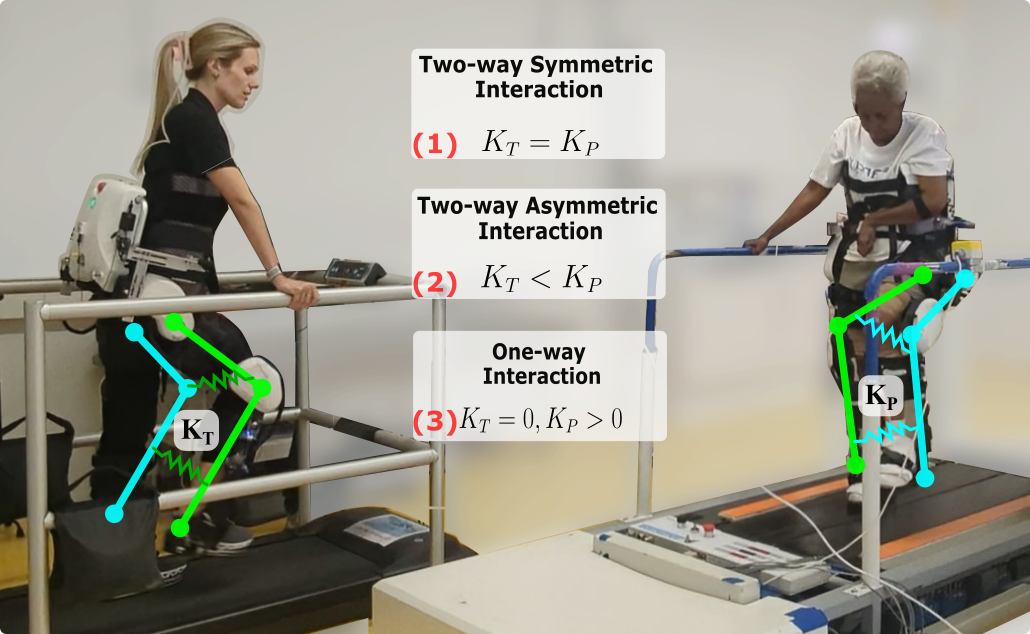
- A framework for Patient-Therapist Robot-Mediated physical interaction during gait rehabilitation.
- The two exchanges forces proportional to the displacement of their joint configurations
- Validated on 6 i-SCI patients and 8 post-stroke patients
- Paper in preparation
- User study investigating the effect of robot switching dynamically roles during a collaborative task
- Robot role defined using Tele-impedance: Follower (zero-stiffness), Leader (High-stiffness), Reciprocal (stiffness inverse of user active stiffness), Mirrored (stiffness proportional to the user active stiffness)

Education
Nancy, France
Degree: PhD
Thesis Title: Toward adaptation in human-robot collaboration
- Robotics Controls
- Machine Learning
- Human studies
- Data Analysis
Acquired skills:
Artificial Intelligence and Robotics, Sapienza University
Rome, Italy
Degree: Master Degree
Thesis Title: Human-guided grasp planning
- Robotics Controls
- Machine Learning
- Planning
- Data Mining
Acquired skills:
Information Engineering, Padua University
Padova, Italy
Degree: Bachelor degree
- Computer science
- Electronics
- Telecommunications
- Controls
- Physics and Mathematics
Acquired skills:
Activities and Awards
- 2025 Workshop organizer at the International Consortium of Rehabilitation Robotics (ICORR/Rehab-Week 2025, Chicago): Robot-Mediated Physical Human-Human Interaction in Neuro-Rehabilitation
- 2025 Special Issue Guest editor for the Journal of NeuroEngineering and Rehabilitation.
- 2025 Special Issue Guest editor for the Journal of Wearable Technologies.
- 2024 Special Session organizer at the International Conference in Neuro-Rehabilitation (ICNR 2024, Spain): Robot-Mediated Physical Human-Human Interaction
- 2024 Workshop organizer at the Summer-School in Neuro-Rehabilitation
- 2023 Workshop organizer at the Summer-School in Neuro-Rehabilitation
- 2021 Track Co-Chair at Applied Human Factors and Ergonomics (AHFE 2021)
- 2021 Exhibition at Smart Automation and Robotics (Automatica 2021)
- 2024 IEEE ICRA Best Paper Award in Medical Robotics and Finalist in Best Paper Award
- 2023 Finalist for Best PhD thesis by GDR MACS
- 2020 Finalist of Humanoids 2020 Best Interactive Paper Award
- 2019 Student Honors Program at Sapienza University
- 2019 Bordoni Scholarship at Sapienza University